

Moderní doba umožňuje realizovat mnoho zajímavých projektů, které byly ještě před pár lety naprosto nemyslitelné. Jedním z nich je možnost sledování letecké dopravy v reálném čase. Před dvaceti a více lety to bylo úplné sci-fi (pokud jste neseděli na řídící věži nebo u vojenského radaru). V roce 2015 ovšem firma Kinetic Avionics toto tabu prolomila a uvedla na trh pasivní přijímač digitálních dat z palubních odpovídačů letadel. Tato data, vysílaná v novém formátu MODE-S za použití unikátních adres palubních odpovídačů doplněná o další data (ADS-B), obsahovala mnoho zajímavých informací, které byly nejen zpracovatelné do grafické podoby, ale bylo možné i konkrétní letadla identifikovat, zpracovávat záznamy, archivovat a sledovat – zkrátka dle vlastních potřeb uživatelů.
Postupem času se na trhu začaly objevovat více či méně profesionální přijímače od konkurentů. Ať již na bázi klasického jednoúčelového přijímače kmitočtu 1090 MHz, který měl za demodulátorem FPGA čip, který zpracovával data a do počítače již posílal kompletní informace, tak na bázi SDR (Softwarové definovaný přijímač), který jen vzorkoval pásmo a vše zpracovával počítač samotný (tj. od demodulace, přes dekódování dat, až po zobrazení výsledků na vizualizační platformě typu Google Earth).
Z výrobců této specifické přijímací techniky se ovšem začali rýsovat dva zásadní hráči, kteří vyráběli svoje jednoúčelové přijímače, ale také vizualizační a databázové prostředí. Byl to již zmiňovaný anglický Kinetic Avionics a velmi záhy s této firmě přidal ještě americký AirNav Systems.
Oba přijímače (SBS-1 i Radar Box) byly poměrně drahé. Jejich cena se pohybovala zpočátku i přes 20.000, -Kč, a proto si je nemohl pořídit každý. Ale i přes tuto vysokou cenu se začali objevovat majitelé a nadšenci do letecké dopravy, kteří měli možnost posunout svůj koníček na vyšší úroveň. To, co bylo možné do té doby jen s leteckou mapou v ruce a přijímačem naladěným na frekvence řízení letového provozu, zobrazil software přijímače na obrazovce počítače v několika vteřinách.

AirNav Systems nebyl ovšem oproti Kinetikům žádným nováčkem v zobrazování leteckého provozu. Firma měla do té doby za sebou řadu úspěchů s programovým balíčkem „AirNav Suite“, což byl v podstatě grafickým prostředím pro zpracování několika zdrojů informací o pozicích letadel. Zdrojem informací bylo v té době nemnoho. Šlo především o dekódování textových zpráv VKV ACARS a HF datalink (KV ACARS) pomocí softwarových dekodérů, a to jak od samotného AirNavu, tak i softwarů třetích stran. Program AirNav Suite v poslední verzi uměl data navíc sdílet i po internetu. Firma AirNav přišla na trh s vlastním hardwarovým ADS-B přijímačem s označením Radar Box. Jejich vývojáři tak vzali základní softwarovou kostru z AirNav Suite a upravili ji na tento hardware. Upraveny a rozšířeny byly i stávající existující servery pro sdílení dekódovaných dat o možnost sdílení i ADS-B dat a doplňující informace o letadlech.
Firma Kinetic v tomto směru začínala na zelené louce a vlastně ani funkce sdílení a distribuci dat nepodporovala. Postupným vývojem byly ale jejich přijímače doplněny o možnost připojení k internetu a záleželo na nápadech z řad nadšenců, jak tyto data zpracovávat a distribuovat.

Dalším zlomovým bodem bylo masivní rozšíření levných SDR přijímačů typu RTL-SDR, které umožňují za jistých podmínek velmi slušné dekódování leteckých dat a tím pádem podobné možnosti, jakými disponují i majitelé originálních zařízení, mnohonásobně dražších. Zásadním problémem těchto přijímačů jsou ovšem možnosti vizualizace dat. Většina programů ať pro Windows, nebo pro Linux, se odkazují na velmi jednoduché řešení pomocí exportu dat do programu Google Earth nebo Google Maps. To je zajímavé řešení pro běžného „civilního“ uživatele, který potřebuje vidět, které letadlo mu letí nad hlavou, ale pro vážnější sledování letecké dopravy použitelné příliš nejsou, jelikož chybí spousta vizualizačních a databázových funkcí.
V následující kapitole si tedy popíšeme výhody a nevýhody dvou základních vizualizačních platforem BASE STATION (Kinetic Avionics) a RADAR BOX (AirNav Systems). Mrkneme pak na webovou civilní odnož FlightRadar24. A poté se ještě dostanu ke krátké historii sdílení radarových dat.
KINETIC AVIONICS – BASE STATION
Přijímač SBS-1 já osobně považuji za první ohromný skok ve vývoji amatérského sledování letecké dopravy. Firma Kinetic Avionics vyvíjela svoje přijímače jak pro profesionální zákazníky (jednalo se integrovaný ADS-B/MODE-S přijímač do PC skříně s obrazovkou a označením SBS-2), tak pro civilní sektor jako externí krabičky připojitelné k USB. Lidé, kteří si zakoupili za nemalé peníze originální přijímač, měli mít k dispozici nejen zobrazení leteckého provozu na velmi profesionální úrovni, ale také měli velmi volné ruce v tom, jak si zobrazení provozu upravit.
Zajímavé je, že se originální program ve své podstatě od úplného začátku v základech příliš nezměnil. Ano, objevilo se zde pár úprav, ty ale většinou souvisely s inovací hardwaru či zjednodušení ovládání, základy ovšem zůstaly stejné. Zvolena byla zkrátka dobrá koncepce zobrazení a ovládání, která v mnoha směrech vyhovovala většině uživatelů.

Čím se ovšem stal program Base Station vedoucím lídrem, byla zvolená koncepce databáze letadel. Každý uživatel si automaticky tvořil s pomocí svého přijímače databázi zachycených letadel a měl možnost si doplňovat informace o nich, archivovat je, ale i exportovat. Forma databáze byla zvolena tak dobře, že ji začali později respektovat i konkurenční producenti ADS-B přijímačů či programů a pokud s touto databází přímo nepracovali, vždy byla možnost z ní informace exportovat nebo jen využívat.
Pro mnoho uživatelů se tak databáze stala něčím, jako sběratelskou relikvií. Jelikož se zde zaznamenávala veškerá zachycená letadla, jakož i data a časy letů. Bylo tedy vždy možné dohledat historii každého letadla a z databáze se tedy stal jakýsi vlastní časosběrný dokument.
Před nějakou dobou jsem měl možnost navštívit centrálu našeho řízení letového provozu v Jenči a měl jsem i unikátní možnost podívat se přímo k řídícím pultům, abych si porovnal to, jak vypadá zobrazení letecké situace u profesionálů a byl jsem velmi překvapen, jak je zobrazení letových informací podobné. Profesionálové mají samozřejmě pár vychytávek navíc (od zobrazení aktuální meteorologické radarové situace na obrazovce, až po podrobné informace i konkrétním letu tzv. elektronických štítků), ale Base Station zase naproti tomu disponuje několika funkcemi, které profíci nemají, protože je samozřejmě nepotřebují.
Nastavení, ovládání a funkce
Firma Kinetic Avionics zvolila velmi rozumný kompromis úrovně nastavení programu. Každý uživatel může nastavit program (zpracování a zobrazení přijímaných dat) buď jen v základních rysech a nechat podrobnosti v základním nastavení od tvůrců a vše bude fungovat ke spokojenosti. Pokud je ale uživatel na pokročilejší úrovni a má představu, jak by chtěl, aby program vypadal (tím samozřejmě nemyslím jen barevné schéma, ale funkce, jednotky, časové stopy apod.), může nad optimalizací prosedět také pár večerů. Základní nastavení je ovšem rozděleno na několik kategorií. Hardware (připojení přijímače), data (jak se mají uchovávat data v databázi letadel), místo (vaše aktuální a definovaná přijímací QTH) a menu vizualizace. Vše je řešeno jednoduchými zaškrtávátky nebo vyplňovacími poli. K softwaru je ke stažení velmi podrobný návod k použití, kde jsou všechny nastavovací položky programu vysvětleny.

Base Station můžete ovládat jak pomocí klávesnice (pomocí od výrobce předdefinovaných neměnných klávesových zkratek), tak pomocí myši nebo touch-padu. Upřímně řečeno, dotykové ovládání pomocí TP rozhodně není žádná hitparáda a ovládání klasickou myší je zde nutností a velkým usnadněním. Rychlost reakcí je velmi slušná, ani s pomalým počítačem nebudete na nic čekat. Jediné, co trvá delší čas, je samotné nastartování aplikace, než si načte všechna data především, pokud máte již databázi letadel větší a nahrává se více uživatelských grafických prvků.
Kladné vlastnosti:
- Rychlost reakcí při pohybu po mapě
- Ukládání „Real Time“ logu a jeho zpětné přehrávání nebo zpracování bez připojeného přijímače
- Extra program pro editaci databáze letadel
- Možnost editace databáze během běžícího hlavního programu
- Přehledné a logické nastavení programu pro začátečníky i „fajnšmekry“
Záporné vlastnosti:
- Pohyb po mapě (mimo zoomování) je možný jen pomocí šipek nebo klávesových zkratek (neexistuje funkce Hold & Move)
- Nedotažené ovládání SDR přijímače u poslední verze přijímače SBS-3, vhodné jen na luštění ACARS, druhý RX jedině pomocí jiného SDR programu
Grafika a vizualizace
Base Station (dále jen BS) používá kompletně vektorové mapy, které si může vytvořit uživatel. Není tedy možné použít jakýkoliv mapový podklad. Program vychází z profesionálních verzí ATC programů, kde není potřeba zobrazovat geografické podklady, ale především letecké sektory, tratě a význačné body. Pro vytváření těchto map můžete použít přímo originální podklady z řízení letového provozu, kde jsou uvedeny souřadnice bodů nebo hranic polygonů. Pomocí jednoduchého webového programu je ovšem možné kreslit libovolné mapy (například půdorys letiště). Mnoho výrobců konkurenčních přijímačů nebo vizualizačních softwarů tyto grafické podklady navíc umí zpracovat.
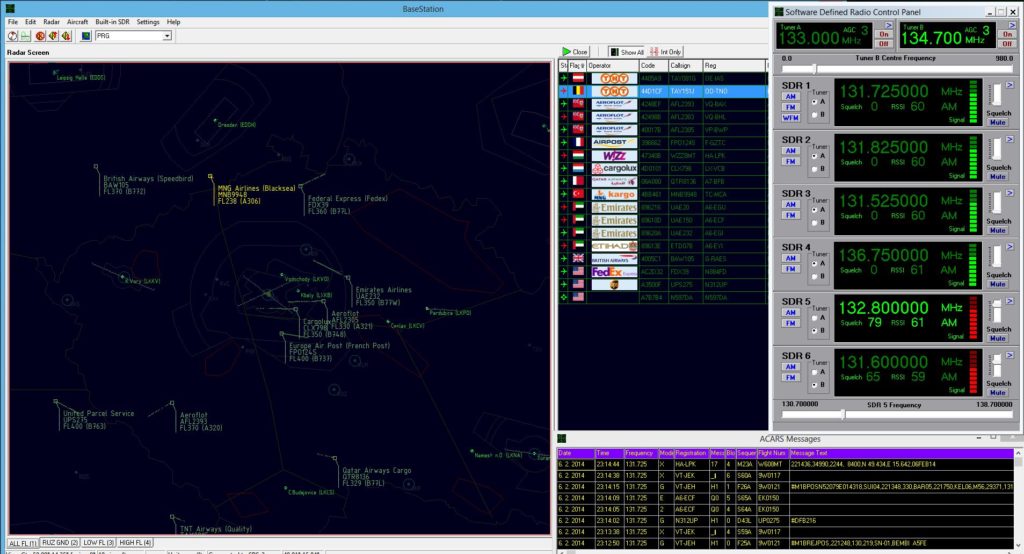
Zobrazení grafických prvků (outlines) má dvě omezení. V BS nemůžete vytvořit plný tvar (vybarvený polygon), pravděpodobně je to z důvodu nečitelnosti případných leteckých informací. Druhé omezení je maximální zoom mapy na 1NM (1,6 km), což není mnoho, pokud sledujete například pozemní provoz na letišti, kde je více objektů u sebe, máte problém je oddělit, jelikož není možné v programu ručně oddělovat názvy objektů na mapě, ty jsou vždy orientovány jedním volitelným směrem.
V základní obrazovce si může nechat uživatel zobrazen seznam aktivních letadel (nejen těch, které jsou vidět na mapě, ale i jen ty, které vysílají svoji identifikaci bez pozice). Tato tabulka nejen vypadá velmi profesionálně, ale je to velkým pomocníkem, pokud sledujete zájmová letadla, jelikož si je můžete jednoduše odfiltrovat a vidíte, zda letí nějaké zajímavé letadlo. Bohužel není možné zobrazit tabulku letadel, když máte program spuštěný v režimu plné obrazovky. V době monitorů s poměrem stran obrazu 4:3 to asi zabíralo místo na obrazovce radaru. Ovšem v době, kdy je většina monitorů formátováno na široký úhel by tato tabulka krásně doplňovala radarovou obrazovku a měla by tak funkci elektronických lístků (stripů). Jelikož již program není několik let vyvíjen, této úpravy se nedočkáme.
Další důležitou funkcí je rozdělení obrazovek a záložkování. Uživatel si může rozdělit obrazovku na více částí s libovolně definovatelným poměrem a na každé části sledovat jiný sektor. Každý pohled na mapu a nastavení zobrazení informací u letadel je možné uložit jako záložku a kliknutím na ni ji okamžitě vyvolat. To je velmi výhodné především, pokud máte dobrý příjem a sledujete větší oblast s hustým leteckým provozem. Jednoduchým klikáním na záložky přecházíte mezi obrazovkami detailů sektorů nebo letišť, popřípadě si takto filtrujete letadla například podle výšky letu.
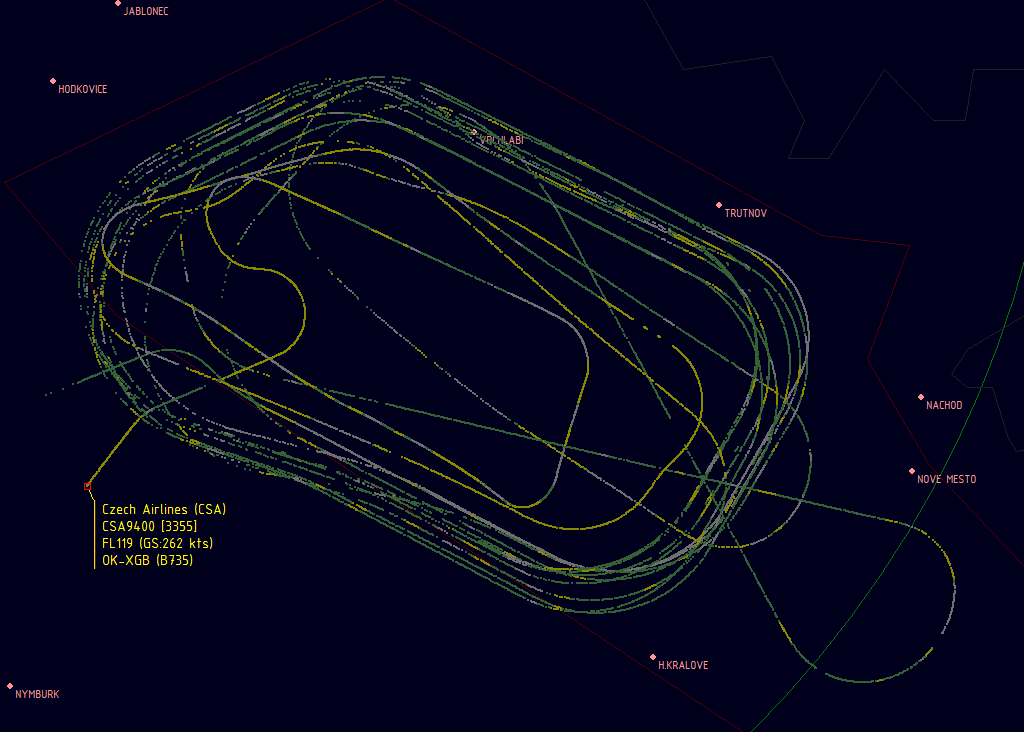
Oproti profesionálům v Jenči máte pár zajímavých funkcí navíc. Můžete sledovat zájmové letadlo jak staticky (letadlo je vždy ve středu obrazovky a posouvá se podkladová mapa), tak dynamicky, kdy se mapa nejen posouvá, ale otáčí ve směru headingu. Je to tedy funkce, jako byste seděli v kabině onoho zájmového letadla a sledovali provoz okolo vás. Samozřejmostí je možnost sledování trailů (historií pozic) letadel. Profesionálové „zahazují“ pozice letadel po několika vteřinách (i když se vše samozřejmě nahrává a archivuje), ale používají velký výpočetní výkon serverů na maximálně přesnou predikci pozic letadel. Nezávisle se počítají reálné rychlosti letadel, hmotnosti apod., aby bylo s téměř stoprocentní jistotou jasné, kde se bude pohybovat každé letadlo za 5-10 minut. Je to samozřejmě kvůli možné předpovědi nebezpečných situací, aby měli dispečeři dostatek času zabránit možnému nebezpečí kolizí letadel ve vzduchu dříve, než by situaci začal řešit palubní systém TCAS. Uživatelé programu Base Station si samozřejmě mohou zapnout i predikci pozic letadel, ale ta je spočítána jen velmi jednoduše dle udávané rychlosti a azimutu letu, a to je informace velmi orientační.
Zajímavá je právě informace o absolvované trajektorii. Spousta uživatelů SBS-1 (SBS-3) právě sleduje především zajímavé trajektorie, které letadla vytváří při zvláštních situacích (holdování, vyhýbání se bouřkám apod.). Program BS je k tomuto účelu skvěle vybaven, protože můžete jedním kliknutím zobrazit vše a okamžitě vidíte, jestli nějaké letadlo mění z nějakého důvodu běžnou trajektorii letu, můžete sledovat jedno nebo více zájmových letadel a oddělit je na obrazovce od „běžných“ letadel apod.
Zajímavá je i možnost grafického zobrazení výšky letadel. To je funkce, která odpovídá vojenskému výškoměru. Pokud například sledujete holdování letadel u letiště, můžete díky této funkci krásně vidět vzdušnou situaci výškově. Vidíte tedy, jak jsou letadla „naskládána“ nad sebou a jak postupně klesají k letišti. Toto zobrazení je velmi zajímavé i případě cvičných letů, kdy piloti dělají tzv. Touch and Go. Pěkné je i sledování měřících letadel ÚCL, která kontrolují parametry radionavigačních zařízení ze vzduchu a musí tedy opisovat přesné kružnice nebo oblouky kolem těchto prostředků.
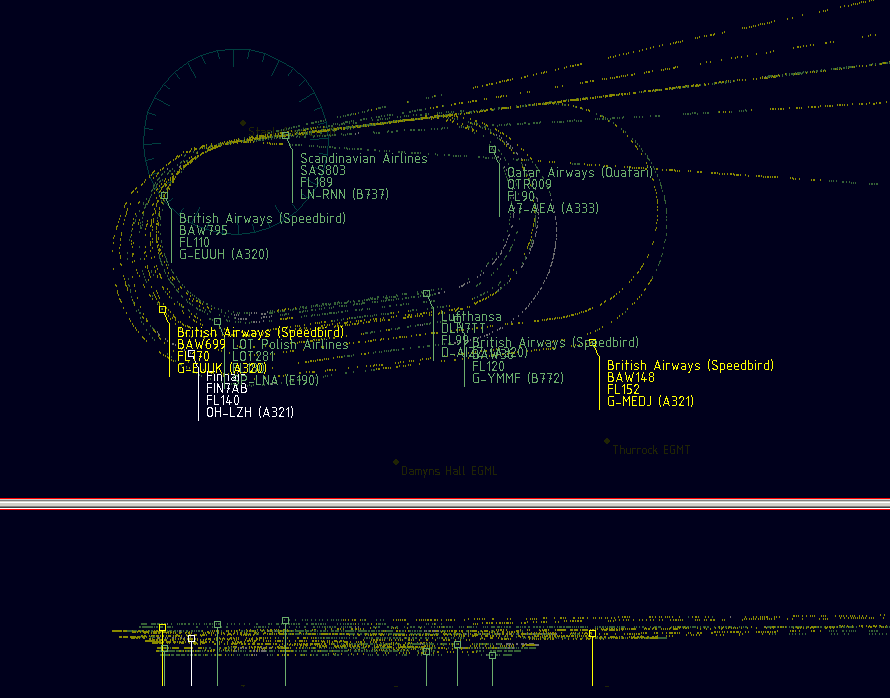
Naprosto zásadní funkcí při porovnání s konkurencí je uživatelsky definovatelné prostředí. Nejen, že si vytváříte vlastní mapové podklady, jak již jsem zmínil, ale také máte téměř volnou ruku v zobrazení informací (vlastní trasy, body, jejich barvy a písmo, tj. velikost a styl). Můžete si libovolně definovat popisky letadel v radaru (písmo, pořadí názvů, jednotky, ale i dělitele jednotek), můžete si definovat barvu letadla podle toho, jakým směrem se pohybuje (správně nadefinované klesání a stoupání letadel vám okamžitě oddělí v nepřehledné obrazovce přílety k letišti od přeletů ve vyšších letových hladinách). To samé platí i pro tabulku letadel, zde si můžete definovat sloupce, které chcete vidět, jednotky, písmo atd. a samozřejmě si můžete definovat i radarové kružnice, jejich vzdálenosti, úhly, styl popisů atd. Zkrátka můžete buď jen sedět a koukat na předdefinované nastavení programu a to vám bude vyhovovat, a nebo se můžete hrabat v nastavení obrazovky a postupně si přizpůsobovat zobrazení. Každému vyhovuje něco jiného a zde je spousta možností, jak nastavit BS jak na malé monitory s malým rozlišením, tak na velké i více monitorové zobrazení.
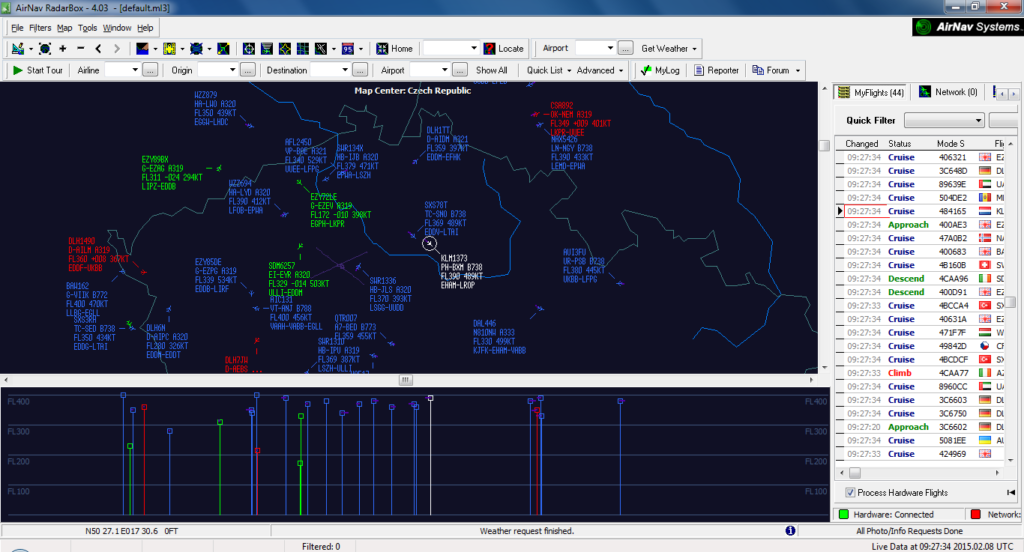
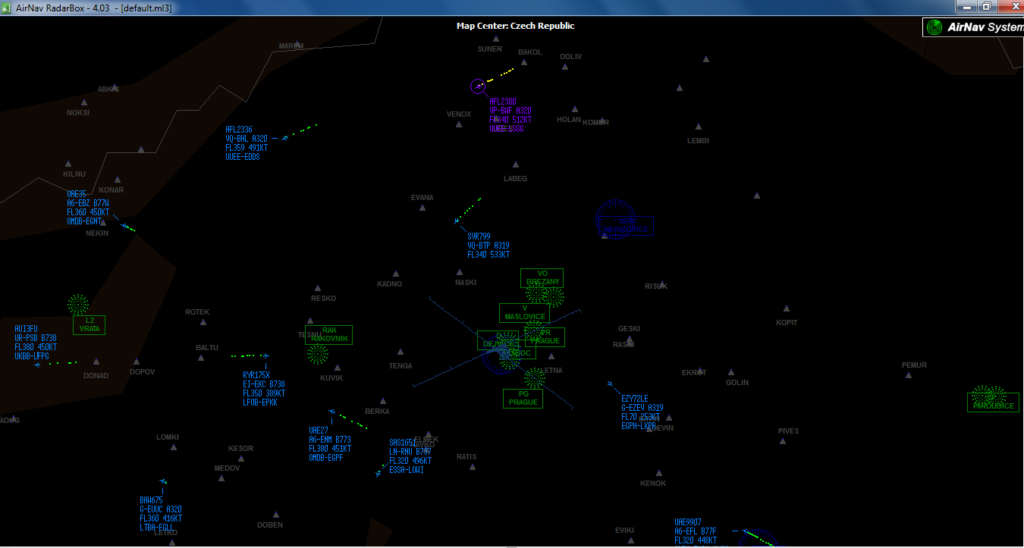
AIRNAV RADARBOX
Firma Airnav Systems měla při vývoji ADS-B přijímače jednu zásadní výhodu a tou byl již mnoho let existující funkční vizualizační software. Bylo tedy jen nutné doplnit komunikaci s externím hardwarem (do té doby se data získávala buď dekódováním signálů pomocí zvukové karty, nebo se získávala z internetových serverů), byla doplněna stejně jako u BS možnost logovat a upravovat data o zachycených letadlech. Celá koncepce vizualizací je ovšem určena především běžným „civilním“ uživatelům, kteří nemají příliš mnoho zkušeností s nastavováním programů, zajímají je letadla a mají dost peněz.
Originální AirNav software oproti BS, nemůžete aktivovat pouhým kliknutím na ikonu programu. Jelikož je každá jednotka identifikována sériovým číslem, je nutné, abyste se nejprve přihlásili jako uživatelé a poté teprve díky internetu budete mít k dispozici základní funkce. Pokud přihlašovací údaje ztratíte, není možné se k nim dostat jinak, než že požádáte emailem, aby vám bylo přihlašovací heslo (přihlašovací jméno je ID jednotky) zasláno. Znamená to tedy, že si firma AirNav vytváří moc pěkný seznam uživatelů svých krabiček.
Na rozdíl od Kinetiků, byl software pro RadarBox tvořen za účelem komerčního využití připojených přijímačů. Když jste si koupili SBS-1 nebo SBS-3, měli jste k dispozici základní software a ten jste si mohli pomocí externích doplňků upravit tak, aby se vám aktualizovala data o letadlech, nahrávaly jejich fotky, tvořili jste si vlastní sady zájmových bodů a map. AirNav vám nabízí kompletní mapové podklady (které ovšem nejsou příliš aktualizovány). Naštěstí je zde možnost nahrát vlastní grafické podklady, které jsou kompatibilní s Base Station. Co ovšem nemůžete aktualizovat, jsou zájmové body, ty sice můžete zadávat do jakési tabulky v nastavení programu, je to ale spíš nouzové řešení pro několik okolních důležitých bodů, rozhodně z toho neuděláte nějaké kompletní a uživatelsky definované podklady.
Totéž platí o aktualizacích letadel. AirNav vám nabízí aktualizaci přímo ze sítě, a to platí jak o popisech letadel a jejich fotografie, tak o určení tratí (odkud – kam letadlo letí) podle čísla letu, resp. volacího znaku. V těchto datech jsou ovšem spousty chyb a neaktuálních informací, takže je nelze brát směrodatně, ale nutno dodat, že je tato služba zdarma.
Co ovšem není zdarma, je připojení do sítě AirNav. Pokud chcete mít možnost sledovat nejen to, co vidíte na vlastní anténě, ale také za horizontem, můžete si zaplatit přístup do sítě. Tento přístup již od začátku není zadarmo, ale na to, že vlastně přispíváte sami do této sítě vlastními daty, čímž ji vlastně rozšiřujete (pokud si tuto funkci nevypnete v nastavení, ale defaultně je toto sdílení zapnuto i ve „free“ verzi), je cena dost vysoká.
Výhody:
- 3D grafický mapový podklad a spojení s Google Earth mapami
- Jednoduché ovládání a uživatelsky přehledné rozhraní
- Automatické doplňování dat o letadlech
- Vytváření vlastní databáze letadel
Nevýhody:
- Placené připojení do sítě
- Omezené možnosti uživatelského nastavení vizualizace
- Seznam zájmových letadel a filtrace dle podmínek jen dle placeného tarifu
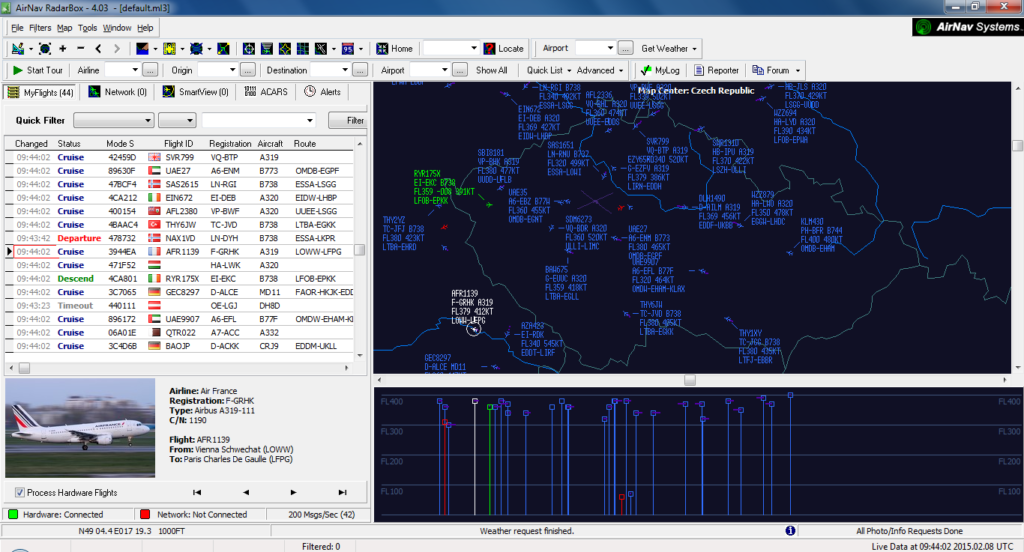
Grafika a vizualizace
Jak již jsem zde několikrát zmínil, základní vizuální stránka je lepší než u Base Station už minimálně v tom, že můžete myší plynule pohybovat s mapou, a to jak 2D, tak 3D modelem zeměkoule, což je ale spíš pozůstatek z AirNav suite a pro sledování dopravy to nemá příliš velký smysl. Tato grafika je velmi efektní, když dekódujete data letadel z krátkých vln, kde jsou letadla daleko od sebe, ale u ADS-B máte pozice letadel relativně blízko sebe a mapa je pak nepřehledná.
Další jednoznačnou výhodou, která u BS jednoznačně chybí, je dynamické zobrazování popisků u letadel. To je opět funkce, která je převzatá z AirNav Suite. Když tuto funkci pomocí stisku jedné klávesy aktivujete, program vám bude automaticky otáčet popisky letadel, tak aby nedocházelo k jejich překrytí. AirNav Suite umožňoval dokonce přímo, aby uživatel popisy ručně posouval dle libosti po mapě. Mimochodem tato funkce se hojně používá na stanovištích řízení letového provozu, aby měl řídící neustále přehled o tom, které letadlo je které a nedocházelo k překrývání nápisů blízko letících letadel v různých letových hladinách.
To, co všechno si můžete nastavit v programu Base Station, na to zde zapomeňte. Popisky u letadel jsou svojí skladbou a obsahem neměnné, nastavit si můžete jen sloupce seznamu letadel. Grafické prostředí umožňuje zobrazit plné topologické prvky (jakýsi pokus o vrstevnice podle nadmořské výšky terénu), zobrazení řek, silnic apod. To jsou ale všechno prvky, které nemají radarové obrazovce co dělat. Ano, pokud letíte v ULL a orientujete se podle vidu, tak to má smysl, ale doma při sledování dopravy, která se řídí pomocí hlásných bodů, navigačních zařízení, je tato funkce jen na efekt, ale k ničemu.
Další velkou nevýhodou je nejasné zobrazení aktivních letadel. Ze seznamu letadel například vůbec nevyčtete, zda letadlo vysílá v módu S nebo kompletní ADS-B. Ano máte možnost zobrazit jen letadla vysílající ADS-B, pokud ale zobrazujete vše, není možné je rozeznat. Filtrovat letadla lze samozřejmě můžete podle aerolinií, letových hladin apod. Podle stejného klíče si můžete nastavit alarmy, ale konkrétní letadla, tedy upozornění na seznam konkrétních HEX adres letadel, není možné.
Zobrazení trailů je u ANRB také velmi omezeno. Můžete si samozřejmě nastavit délku zobrazování trailů, ale pouze u všech letadel najednou a není možné sledovat jen jedno letadlo včetně trailu a ostatní potlačit jako BS. Pokud si vypnete a znovu zapnete traily, automaticky tím zahodíte doposud nasbírané pozice. U BS pokračujete dál a vidíte historii, dokonce si můžete zobrazit i letadla, která již nejsou vidět.
RadarBox od firmy AirNav Systems byl jednoznačně mnohem civilnější „efektní“ verze pro uživatele typu airspotterů, které zajímá především co jim letí nad hlavou. Program je poměrně jednoduchý na nastavení a ovládání, takže jej každý začátečník zvládne velmi rychle. Co mě osobně docela dost vadí je, že za základní funkce chce AirNav poměrně velké peníze, ale na aktualizacích programu to příliš vidět není. Jedinou nadstavbou za celou historii RadarBoxu je funkce 3D, která nedělá nic jiného, než že vám zobrazí do nepřehledného okna ještě další okno s Google Earth a 3D modely letadel podle aktuální radarové situace – tedy opět jen na efekt, ale pro praktické sledování vzdušné situace naprosto zbytečné.
RADAROVÉ SÍTĚ A SDÍLENÍ DAT
Jak se zařízení SBS-1 stalo velkým hitem již záhy po svém uvedení na trh, se začal samozřejmě po Evropě stoupat počet uživatelů a v diskusních fórech (především na originálním fóru přímo na stránkách výrobce) se začaly objevovat názory, že by bylo dobré vytvořit nějakou celoevropskou síť, kde by bylo možné uživatelům zpřístupnit data ostatních uživatelů. Přijímač SBS-1 ovšem na tuto funkci nebyl vůbec připraven. Jednak byl přijímač připojen jen pomocí USB (LAN modul byl výrobcem instalován až do druhé generace SBS-1 a tak se do prvních verzí musel ručně dobastlit) a jednak zde byly problémy i v komunikaci s programem BS.

První problém byl v tom (a to platí o celé generaci verze 1), že SBSka posílá data do programu Base Station v vlastním formátu. Tento protokol bylo tedy nutné „prolomit“, což se po nějaké době povedlo a vzniklo tak několik zajímavých projektů na vizualizaci dat programů třetích stran a na webové stránky. Druhým problémem byl samotný program Base Station, který se periodicky dotazoval na SBSku. Pokud do určité doby nedostal odpověď, prohlásil hardware za odpojený a ignoroval přicházející data. Tímto byl zabezpečeno to, že byl k jednomu přijímači vždy připojen jen jeden počítač (i skrz pozdější LAN připojení). I tento problém byl později vyřešen softwarovou obezličkou s označením MultiEM (Multi-Emulator), která nejen dokázala distribuovat data z jednoho počítače, ke kterému byl připojena SBSka, dalším klientům, ale také sloužila jako generátor odpovědí hardwaru pro program Base Station.
Program Base Station tedy neumožňoval připojení do větší sítě, jelikož vždy vyžadoval odpovědi od hardwaru. Bylo možné pomocí externích programů přepínat vzdálené uživatele a přijímat tak sdílená data. V principu jste měli tři možnosti, jak se dostat do sítě k jinému přijímači. Buď jste znali veřejnou IP adresu počítače, na který byla SBSka připojena s běžícím programem MultiEM a připojovali jste se tedy přímo. Nebo to samé obstarával herní tunelovací nástroj známý jako Hamachi server, který vytvářel virtuální síť, na jejíž konci byl počítač s přijímačem a třetí možností byl server, který by obstarával multiplex uživatelů.

Takový server měl na svědomí jistý Piotr Pawluczuk, který dal dohromady síť Piopawlu. Ta dokázala uživatelům nabídnout připojení do cizích SBS-1 i Radarboxů a to pomocí jednoduchého přepínání klientů na webovém rozhraní. Současně ale dekódovaná data byla i vizualizována do prostředí podobnému pozdějšímu Flightradaru24.com. Mimochodem, ten samý Piotr Pawluczuk době pracuje pro zmiňovaný server FR24.COM. Náhoda? Nikoliv. Jen to, co ho kdysi bavilo, ho živí. Server Piopawlu samozřejmě již nefunguje, zato FR24 se stal megaprojektem, do kterého je zapojeno po celém světě tisíce přijímačů ADS-B a dokonce i dekodéry pozičních dat ze Satelitní komunikace (INMARSAT).
FR24.COM je alternativou nejen pro uživatele SBS-1, ale i RadarBoxů, ale také majitelé jednoúčelových počítačů Raspberry PI a RTL-SDR klíčenek. Pokud uživatelé pravidelně do sítě přispívají (daty), mají přístup na webové stránky bez reklam a pár drobných funkcí navíc.

FR24 ovšem není klasický program pro vizualizaci sbírání dat o letadlech. Je to především vizualizátor aktuální radarové situace pro běžné „civilní“ uživatele, kteří si jej zapnou občas, aby se podívali, co jim letí nad hlavou, nebo jak tetička letí do Řecka na dovolenou. Žádná off-line katalogizace, žádné možnosti editace informací o letadlech (nebo jen velmi omezená) a především žádné pěkné traily. Na druhou stranu jsou zde spojeny přijímače různých výrobců do jedné sítě a vzájemně se doplňují i když jen na straně webového rozhraní FR24.
Poslední alternativou je (nebo spíš již jen byla) radarová síť COAA Plane Plotter (dále jen PP). Do sítě PP se mohl připojit každý, kdo měl k dispozici jakýkoliv přijímač na 1090 MHz a to včetně známé klíčenky RTL-SDR. Připojení do sítě bylo součástí stejnojmenného vizualizačního programu. Ten byl sice placený, ale jen jednorázově, kdy jste zaplatili za licenci na počítač. Samozřejmě připojení do sítě nebyla podmínkou provozu tohoto programu. Program samotný je zajímavý koncentrátor dat z různých zdrojů a jejich vizualizátor. PP umožňuje dekódovat poziční data jak z přijímačů 1090 MHz, tak ACARS (má v sobě dekodér ze zvukové karty), HF Datalink (například pomocí běžícího programu PC-HFDL) nebo VDL2 (pomocí běžícího programu MultiPSK) a všechny zdroje informací kombinovat do uceleného obrazu.
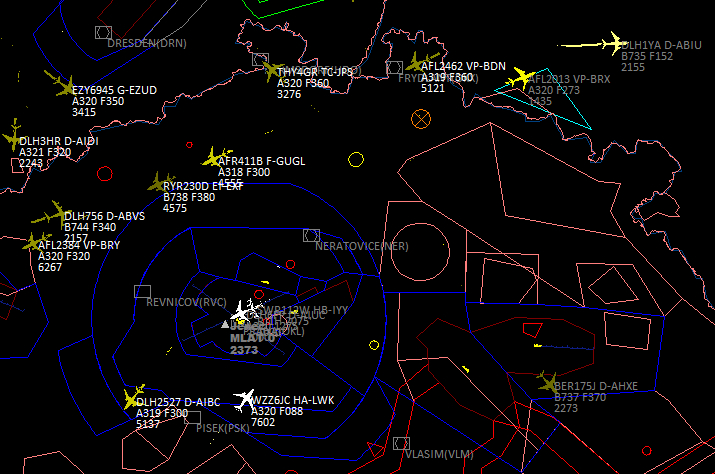
Síť COAA umožňovala sdílet nejen dekódovaná data z MODE-S/ADS-B přijímačů, ale i informace o pozicích dekódované z již zmiňovaných dekodérů datových přenosů. Jako jedna z prvních sítí (ne-li možná úplně první) měla velmi podstatnou funkci. A tou byla možnost zobrazení pozic letadel, která nevysílají v režimu ADS-B informace o své poloze, tedy výpočet pozic letadel pomocí tzv. Multilaterace. Jednalo se o výpočet hyperbolické pozice letadla z informací od několika uživatelů, kteří signál z letadla zachytí a přiřadí mu časovou stopu. Síť PP umožňovala jak funkci automatické multilaterace, pokud přicházely stabilní časově-datové stopy letadla od různých uživatelů, tak multilateraci „na vyžádání“ kdy se uživatel dotazoval na konkrétní letadlo.
V současné době je projektů vizualizace pozic letadel mnohem více, většina z nich ale bohužel míří jen na základní uživatele „konzumenty“, jelikož jejich grafické prostředí odpovídá především doplněným mapovým podkladům (já jim říkám „omalovánky“). Samotnou katalogizací letadel s možností vytváření záznamů, trailů apod. se tedy vývojáři programů příliš nezaobírají. Na druhou stranu jsou možnosti dekódování ADS-B dat mnohem jednodušší i pro domácí uživatele. Zde je stručný soupis možností dekódování ADS-B (MODE-S) dat.
SOUČASNÝ HARDWARE:
FLIGHTRADAR24 BOX – toto zařízení je stále ještě poctivý přijímač na 1090 MHz z dílny německé firmy JETVISION, který zpracovává data pomocí FPGA procesoru, má k dispozici vstup pro GPS anténu, která maximálně zpřesní časovou stopu pro výpočet pozic multilaterací. Postavené je to celé na jednoduchém počítači BeagleBone (stejný, který se používá pro krátkovlnné přijímače KiwiSDR). Tento přijímač můžete dostat domů zdarma a tím pádem i plný přístup k webové stránce FR24. Zařízení ale musí samozřejmě běžet 24/7/365. Dále je možné využít úplně obyčejnou klíčenku RTL-SDR a Raspberry PI s upraveným programem, který směru data na server FR24.

FLIGHTAWARE FLIGHTFEEDER – je zařízení opět postavené ba 8bitovém přijímači RTL-SDR doplněným o SAW filtr 1090 MHz na vstupu. Tento server opět umožňuje sdílení dat i z obyčejné klíčenky RTL-SDR a RPi. Je zde ovšem jedna zajímavá funkce. Na Flightfeederu jakož i na RPi běží webové rozhraní, ke kterému je možné se připojit a sledovat letadla, která momentálně dekódujete. Flightaware vám ovšem do tohoto seznamu letadel dodá informace o pozicích letadel pomocí multilaterace, takže vlastně vidíte letadla, která by jste s jedním přijímačem viděli jen v seznamu, ale bez polohy. Druhou výhodou je možnost volby uživatelské formátu výstupních dat. Na těchto přijímačích totiž můžete převádět data třeba na formát SBS-1 (Base Station) a ty zpracovávat, ale vidíte i letadla, která používají odpovídač jen v režimu MODE-S. Zkrátka za to, že sdílíte informace, dostáváte něco navíc oproti FR24.

RADARBOX FLIGHTSTICK – Je jednoduchá levná verze přijímače 1090 MHz. Jedná se opět o klíčenku RTL-SDR doplněnou od 1090 MHz filtr. K ní musíte mít počítač nebo RPi, aby bylo možné data distribuovat data do sítě AirNav. Tento přijímač vám umožní za sdílení dat přístup do sítě RadarBox s některými placenými funkcemi.

RADARBOX XRANGE – Je přepracovaný plnohodnotné jednoúčelové přijímače RadarBox pro pásmo 1090 MHz, které zpracovávají a distribuují data do sítě a o včetně dat potřebných pro počítání multilaterace. Uvnitř jsou filtry, zesilovač a jednodeskový přijímač. Cena tohoto přijímače se pohybuje přes 300 EUR, což není málo, ale k dispozici pak máte většinu placených síťových služeb. Aktuální verze programu jsou bohužel už jen omalovánky a nelze použít vlastní vektorové podklady.

RADARBOX XRANGE 2 – Asi měl být původně následovník a rozšíření přijímače XRANGE, ale podle všeho někdo ušetřil a do poměrně drahé krabičky nacpal jednodeskový počítač Raspberry PI s připojeným přijímačem Flightstick a upraveným systémem. Zajímavostí je, že je v krabičce ještě místo na druhou klíčenku, možná přímo na poslech leteckého pásma, nebo UAT přijímač, tato část ale není osazená. Každopádně je to podvod na zákazníky a pokud chcete plnohodnotný přijímač ADS-B, musíte použít první verzi.

Je rozdíl mezi plnohodnotným přijímačem 1090 MHz a univerzální klíčenkou RTL-SDR (i doplněnou o filtr) ? Ano je a není malý. Univerzální přijímače RTL-SDR mají dvě nevýhody, které hovoří proti vážnějšímu použití. Jednak mají celkem vysoký vlastní šum, takže špatně dekódují slabé vzdálené stanice. Jelikož ale jsou i málo odolné, tak vám velmi často blízko letící letadlo zahltí svým odpovídačem příjem a tím pádem vám budou vypadávat pozice vzdálenějších letadel, které by jste normálě viděli. Klasické přijímače, které mají na vstupu jednak kvalitní filtry a nízkošumový předzesilovač, ale hlavně mají dobře zpracované AVC, těmito neduhy netrpí a výsledkem je možnost sledování mnohem vzdálenějších letadel, než by bylo možné s RTL-SDR. S těmito přijímači můžete dokonce sledovat i takové efekty jakými jsou odrazy signálů od samotných letadel, rain-scatter (lom signálů od deště nebo od hustých frontálních oblaků).